Bayesian Neural Networks
Motivation
Bayesian neural networks are different from plain neural networks in that weights and biases in Bayesian neural networks are interpreted in a probabilistic manner. Instead of finding a point estimation of weights and biases, in Bayesian neural networks, a prior distribution is assigned to the weights and biases, and a posterior distribution is obtained from the data. It relies on the Bayes formula
Here $\mathcal{D}$ is the data, e.g., the input-output pairs of the neural network $\{(x_i, y_i)\}$, $w$ is the weights and biases of the neural network, and $p(w)$ is the prior distribution.
If we have a full posterior distribution $p(w|\mathcal{D})$, we can conduct predictive modeling using
However, computing $p(w|\mathcal{D})$ is usually intractable since we need to compute the normalized factor $p(\mathcal{D}) = \int p(\mathcal{D}|w)p(w) dw$, which requires us to integrate over all possible $w$. Traditionally, Markov chain Monte Carlo (MCMC) has been used to sample from $p(w|\mathcal{D})$ without evaluating $p(\mathcal{D})$. However, MCMC can converge very slowly and requires a voluminous number of sampling, which can be quite expensive.
Variational Inference
In Bayesian neural networks, the idea is to approximate $p(w|\mathcal{D})$ using a parametrized family $p(w|\theta)$, where $\theta$ is the parameters. This method is called variational inference. We minimize the KL divergeence between the true posterior and the approximate posterial to find the optimal $\theta$
Evaluating $p(\mathcal{D})\geq 0$ is intractable, so we seek to minimize a lower bound of the KL divergence, which is known as variational free energy
In practice, thee variational free energy is approximated by the discrete samples
Parametric Family
In Baysian neural networks, the parametric family is usually chosen to be the Gaussian distribution. For the sake of automatic differentiation, we usually parametrize $w$ using
Here $\theta = (\mu, \sigma)$. The prior distributions for $\mu$ and $\sigma$ are given as hyperparameters. For example, we can use a mixture of Gaussians as prior
The advantage of Equation 1 is that we can easily obtain the log probability $\log p(w|\theta)$.
Because $\sigma$ should always be positive, we can instead parametrize another parameter $\rho$ and transform $\rho$ to $\sigma$ using a softplus function
Example
Now let us consider a concrete example. The following example is adapted from this post.
Generating Training Data
We first generate some 1D training data
using ADCME
using PyPlot
using ProgressMeter
using Statistics
function f(x, σ)
ε = randn(size(x)...) * σ
return 10 * sin.(2π*x) + ε
end
batch_size = 32
noise = 1.0
X = reshape(LinRange(-0.5, 0.5, batch_size)|>Array, :, 1)
y = f(X, noise)
y_true = f(X, 0.0)
close("all")
scatter(X, y, marker="+", label="Training Data")
plot(X, y_true, label="Truth")
legend()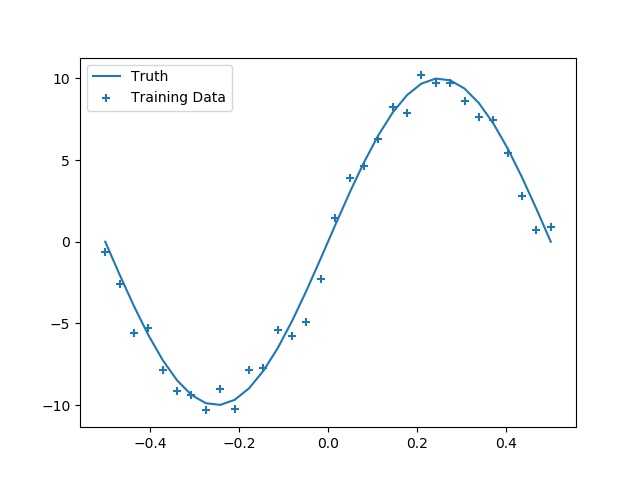
Construct Bayesian Neural Network
mutable struct VariationalLayer
units
activation
prior_σ1
prior_σ2
prior_π1
prior_π2
Wμ
bμ
Wρ
bρ
init_σ
end
function VariationalLayer(units; activation=relu, prior_σ1=1.5, prior_σ2=0.1,
prior_π1=0.5)
init_σ = sqrt(
prior_π1 * prior_σ1^2 + (1-prior_π1)*prior_σ2^2
)
VariationalLayer(units, activation, prior_σ1, prior_σ2, prior_π1, 1-prior_π1,
missing, missing, missing, missing, init_σ)
end
function kl_loss(vl, w, μ, σ)
dist = ADCME.Normal(μ,σ)
return sum(logpdf(dist, w)-logprior(vl, w))
end
function logprior(vl, w)
dist1 = ADCME.Normal(constant(0.0), vl.prior_σ1)
dist2 = ADCME.Normal(constant(0.0), vl.prior_σ2)
log(vl.prior_π1*exp(logpdf(dist1, w)) + vl.prior_π2*exp(logpdf(dist2, w)))
end
function (vl::VariationalLayer)(x)
x = constant(x)
if ismissing(vl.bμ)
vl.Wμ = get_variable(vl.init_σ*randn(size(x,2), vl.units))
vl.Wρ = get_variable(zeros(size(x,2), vl.units))
vl.bμ = get_variable(vl.init_σ*randn(1, vl.units))
vl.bρ = get_variable(zeros(1, vl.units))
end
Wσ = softplus(vl.Wρ)
W = vl.Wμ + Wσ.*normal(size(vl.Wμ)...)
bσ = softplus(vl.bρ)
b = vl.bμ + bσ.*normal(size(vl.bμ)...)
loss = kl_loss(vl, W, vl.Wμ, Wσ) + kl_loss(vl, b, vl.bμ, bσ)
out = vl.activation(x * W + b)
return out, loss
end
function neg_log_likelihood(y_obs, y_pred, σ)
y_obs = constant(y_obs)
dist = ADCME.Normal(y_pred, σ)
sum(-logpdf(dist, y_obs))
end
ipt = placeholder(X)
x, loss1 = VariationalLayer(20, activation=relu)(ipt)
x, loss2 = VariationalLayer(20, activation=relu)(x)
x, loss3 = VariationalLayer(1, activation=x->x)(x)
loss_lf = neg_log_likelihood(y, x, noise)
loss = loss1 + loss2 + loss3 + loss_lfOptimization
We use an ADAM optimizer to optimize the loss function. In this case, quasi-Newton methods that are typically used for deterministic function optimization are not appropriate because the loss function essentially involves stochasticity.
Another caveat is that because the neural network may have many local minimum, we need to run the optimizer multiple times in order to obtain a good local minimum.
opt = AdamOptimizer(0.08).minimize(loss)
sess = Session(); init(sess)
@showprogress for i = 1:5000
run(sess, opt)
end
X_test = reshape(LinRange(-1.5,1.5,32)|>Array, :, 1)
y_pred_list = []
@showprogress for i = 1:10000
y_pred = run(sess, x, ipt=>X_test)
push!(y_pred_list, y_pred)
end
y_preds = hcat(y_pred_list...)
y_mean = mean(y_preds, dims=2)[:]
y_std = std(y_preds, dims=2)[:]
close("all")
plot(X_test, y_mean)
scatter(X[:], y[:], marker="+")
fill_between(X_test[:], y_mean-2y_std, y_mean+2y_std, alpha=0.5)