Inverse Modeling
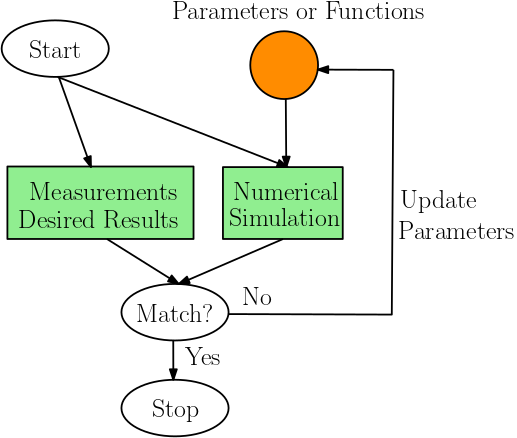
Inverse modeling (IM) identifies a certain set of parameters or functions with which the outputs of the forward analysis matches the desired result or measurement. IM can usually be solved by formulating it as an optimization problem. But the major difference is that IM aims at getting information not accessible to forward analysis, instead of obtaining an optimal value of a fixed objective function and set of constraints. In IM, the objective function and constraints can be adjusted, and prior information of the unknown parameters or functions can be imposed in the form of regularizers, to better reflect the physical laws.
For example, given an image $x\in\mathbb{R}^{1024\times 1024}$, the forward analysis is given by $y = F(x) = \sum_{i,j} x_{i,j}$, i.e., the summation of all pixel values. One possible IM problem requires you to estimate $x$ given the measurement $y$. It can be formulated an optimization problem $\min_x (F(x)-y)^2$, which is underdetermined. However, if we have the prior that the image is a pure color image, then the inverse problem is well-defined and has a unique solution. There are many ways to impose this prior as contraints to the optimization problem, but the IM problem itself may not be described as an optimization problem.
Automatic Differentiation
One powerful tool in inverse modeling is automatic differentiation (AD). Automatic differentiation is a general way to compute gradients based on the chain rule. By tracing the forward-pass computation, the gradient at the final step can propagate back to every operator and every parameter in a computational graph.
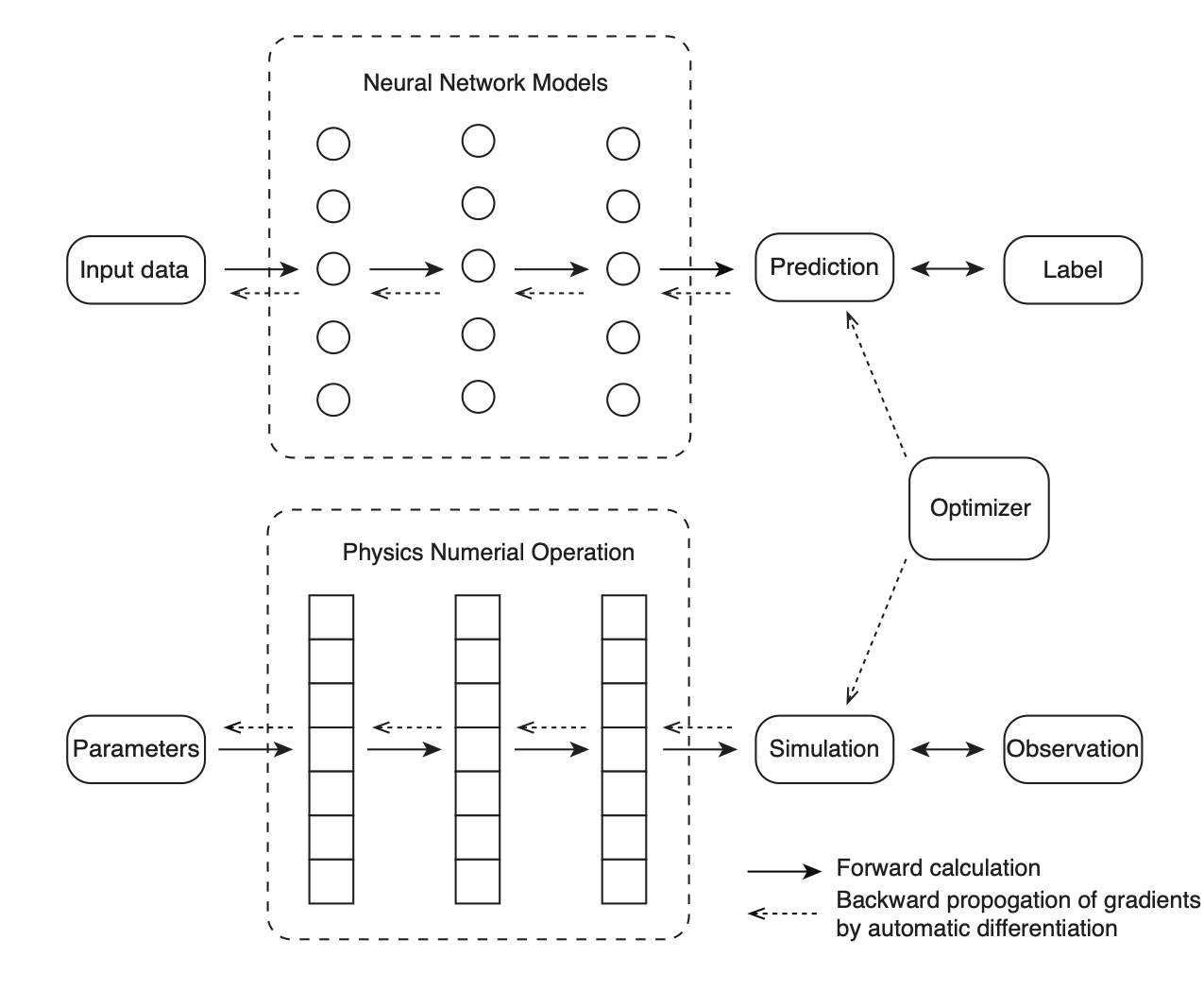
As an example, a neural network model mainly consists of a sequence of linear transforms and non-linear activation functions. The goal of the training process is to minimize the error between its prediction and the label of ground truth. Automatic differentiation is used to calculate the gradients of every variable by back-propagating the gradients from the loss function to the trainable parameters, i.e., the weights and biases of neural networks. The gradients are then used in a gradient-based optimizer such as gradient descent methods to update the parameters.
For another example, the physical forward simulation is similar to the neural network model in that they are both sequences of linear/non-linear transforms. One popular method in physical simulation, the FDTD (Finite-Difference Time-Domain) method, applies a finite difference operator to a consecutive time steps to solve time-dependent partial differential equations (PDEs). In seismic problems, we can specify parameters such as earthquake source functions and earth media properties to simulate the received seismic signals. In seismic inversion problems, those parameters are unknown and we can invert the underlining source characteristic and media property by minimizing the difference between the simulated seismic signals and the observed ones. In the framework of automatic differentiation, the gradients of the difference can be computed automatically and thus used in a gradient-based optimizer.
AD Implementation in ADCME
ADCME uses TensorFlow as the backend for automatic differentiation. However, one major difference of ADCME compared with TensorFlow is that it provides a friendly syntax for scientific computing (essentially the same syntax as native Julia). This substantially reduces development time. In addition, ADCME augments TensorFlow libraries by adding missing features that are useful for scientific computing, such as sparse matrix solve, sparse least square, sparse assembling, etc. Additionally, Julia interfaces make it possible for directly implementing efficient numerical computation parts of the simulation (requires no automatic differentiation), for interacting with other languages (MATLAB, C/C++, R, etc.) and for built-in Julia parallelism.
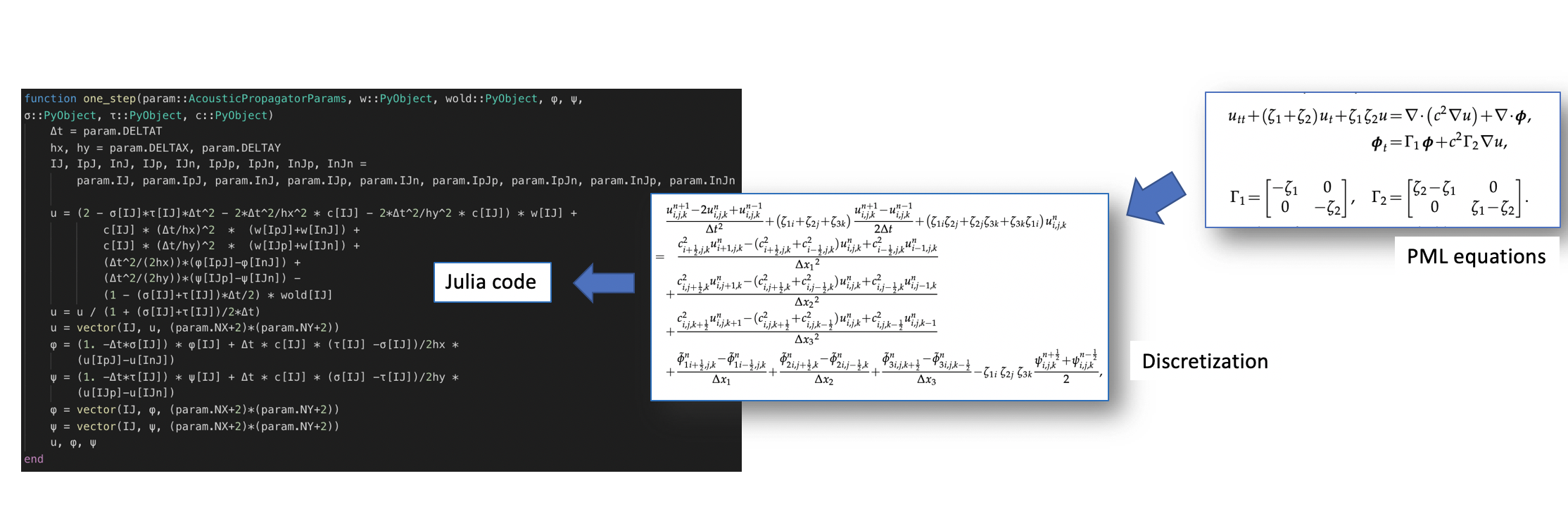
As an example, we show how a convoluted acoustic wave equation simulation with PML boundary condition can be translated to Julia codes with AD feature very neatly.
Forward Operator Types
All numerical simulations can be decomposed into operators that are chained together. These operators range from a simple arithmetic operation such as addition or multiplication, to more sophisticated computation such as solving a linear system. Automatic differentiation relies on the differentiation of those operators and integrates them with chain rules. Therefore, it is very important for us to study the basic types of existing operators.
In this tutorial, a operator is defined as a numerical procedure that accepts a parameter called input, $x$, and turns out a parameter called ouput, $y=f(x)$. For reverse mode automatic differentiation, besides evaluating $f(x)$, we need also to compute $\frac{\partial J}{\partial x}$ given $\frac{\partial J}{\partial y}$ where $J$ is a functional of $y$.
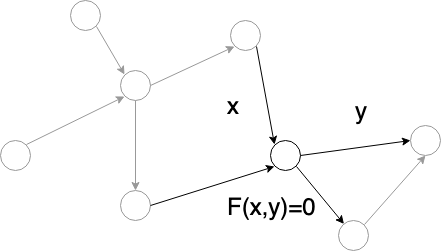
Note the operator $y=f(x)$ may be implicit in the sense that $f$ is not given directly. In general, we can write the relationship between $x$ and $y$ as $F(x,y)=0$. The operator is well-defined if for given $x$, there exists one and only one $y$ such that $F(x,y)=0$.
For automatic differentiation, besides the well-definedness of $F$, we also require that we can compute $\frac{\partial J}{\partial x}$ given $\frac{\partial J}{\partial y}$. It is easy to see that
\[\frac{\partial J}{\partial x} = -\frac{\partial J}{\partial y}F_y^{-1}F_x\]
Therefore, we call an operator $F$ is well-posed if $F_y^{-1}$ exists.
All operators can be classified into four types based on the linearity and explicitness.
Linear and explicit
This type of operators has the form
\[y = Ax\]
where $A$ is a matrix. In this case,
\[F(x,y) = Ax-y\]
and therefore
\[\frac{\partial J}{\partial x} = \frac{\partial J}{\partial y}A\]
In Tensorflow, such an operator can be implemented as (assuming A is )
import tensorflow as tf
@tf.custom_gradient
def F(x):
u = tf.linalg.matvec(A, x)
def grad(dy):
return tf.linalg.matvec(tf.transpose(A), dy)
return u, gradNonlinear and explicit
In this case, we have
\[y = F(x)\]
where $F$ is explicitly given. We have
\[F(x,y) = F(x)-y\Rightarrow \frac{\partial J}{\partial x} = \frac{\partial J}{\partial y} F_x(x)\]
One challenge here is we need to implement the matrix vector production $\frac{\partial J}{\partial y} F_x(x)$ for grad.
Linear and implicit
In this case
\[Ay = x\]
We have $F(x,y) = x-Ay$ and
\[\frac{\partial J}{\partial x} = \frac{\partial J}{\partial y}A^{-1}\]
Nonlinear and implicit
In this case $F(x,y)=0$ and the corresponding gradient is
\[\frac{\partial J}{\partial x} = -\frac{\partial J}{\partial y}F_y^{-1}F_x\]
This case is the most challenging of the four but widely seen in scientific computing code. In many numerical simulation code, $F_y$ is usually sparse and therefore it is rewarding to exploit the sparse structure for computation acceleration in practice.